并行训练系列:7. Flash Attention V1/V2
对于输入序列长度为\(N\)的 Transformer 类模型,其计算复杂度和存储空间为\(O(N^2)\);Flash Attention(Fast and Memory Efficient Exact Attention with IO-Awareness) 技术旨在缓解上述计算和存储压力。
一个洞察为:计算慢的卡点在于读写速度,而非计算能力。Flash Attention 通过 tiling 和 kernel fusion 降低对显存(HBM)的访问次数以加速计算。
计算瓶颈分析:
定义:
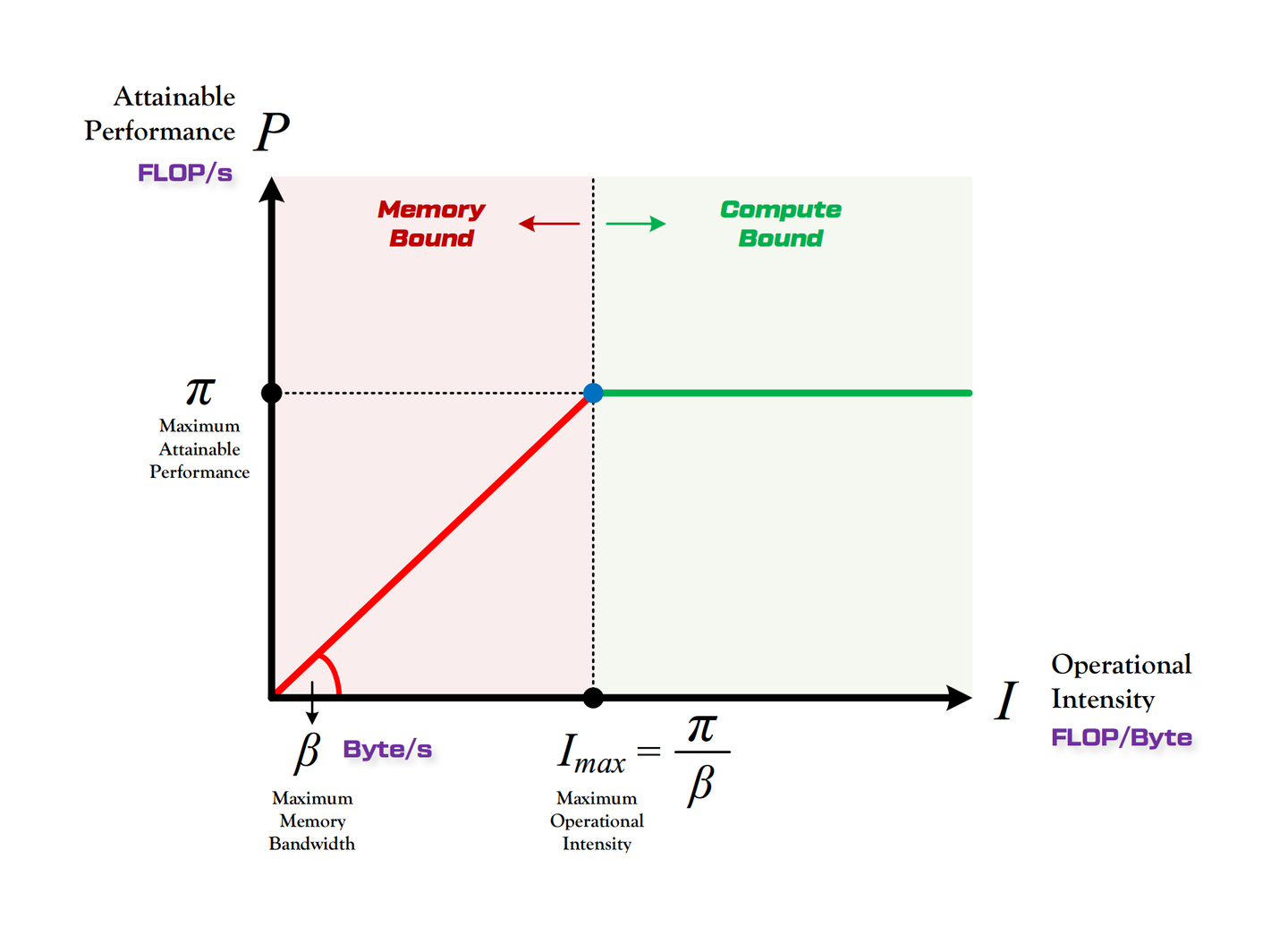
- \(\pi\):硬件算力上限。每秒钟能完成的浮点运算次数,单位是 FLOPS 或 FLOP/s;
- \(\beta\):硬件带宽上限。每秒能完成的内存交换次数,单位是 Byte/s;
- \(\pi_t\):算法所需的总计算量;\(\beta_t\):算法所需的总数据读取存储量。
算法的计算时间:\(T_{cal}=\frac{\pi_t}{\pi}\);算法的数据读取时间:\(T_{load}=\frac{\beta_t}{\beta}\)
计算限制:\(T_{cal}>T_{load}\);内存限制:\(T_{cal}<T_{load}\)
大矩阵乘法通常受计算限制;逐点运算操作(激活函数、dropout、mask、softmax、normalization 等)受内存限制。
假设矩阵\(Q, K\in\mathbb{R}^{N\times d}\),其中\(N\)为序列长度,\(d\)为 embedding dim;标准注意力的计算公式为:
\[ O=softmax(\frac{1}{\sqrt{d}}QK^T)V=softmax(S)V=PV \]
数据读取量:
- 第1步对\(Q, K\)的读取共2次,第3步对\(S\)的写入1次;
- 第4步对\(S\)的读取1次,第7步对\(P\)的写入1次;
- 第8步对\(P, V\)的读取共2次,第10步对\(O\)的写入1次。
\(\frac{\pi_t}{\beta_t}=\frac{4N^2d}{2Nd+2Nd+4N^2}=\frac{N^2d}{Nd+N^2}\)
标准注意力在 SRAM 和 HBM 之间的交互流程如下:
 大矩阵乘法通常受计算限制;逐点运算操作(激活函数、dropout、mask、softmax、normalization 等)受内存限制。
大矩阵乘法通常受计算限制;逐点运算操作(激活函数、dropout、mask、softmax、normalization 等)受内存限制。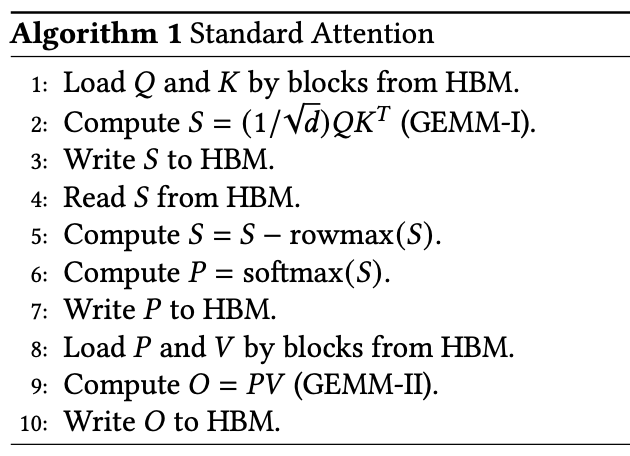 计算量:计算
计算量:计算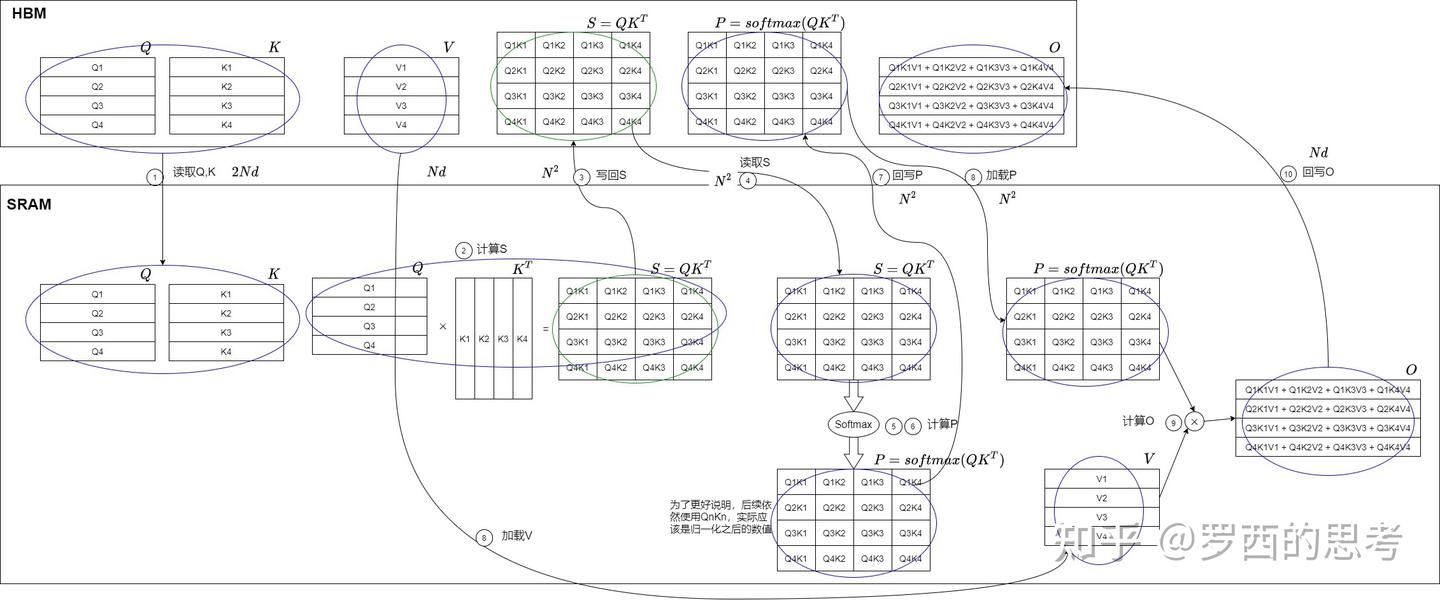
GPU 的计算流程是:将数据从显存(HBM)加载至 on-chip 的 SRAM 中,由 SM 读取并计算;计算结果通过 SRAM 返回给 HBM。最节省内存的做法是:以 SRAM 的存储为上限,尽可能每次加载时打满,目标是减少 HBM 和 SRAM 之间的换入换出。
标准注意力机制\(softmax(\frac{QK^T}{\sqrt{d_k}}\times V)\)主要分为3个步骤,分别对应依次执行的3个 kernel:**gemm(query×key)、point-wise的softmax、gemm(attn_score×value)**。Flash Attention 的方案是:以两个 gemm kernel 为中心进行融合,使用 SRAM 存储中间结果(不写回 HBM);通过分块解决无法容纳整个中间矩阵的问题。
整体流程如下: 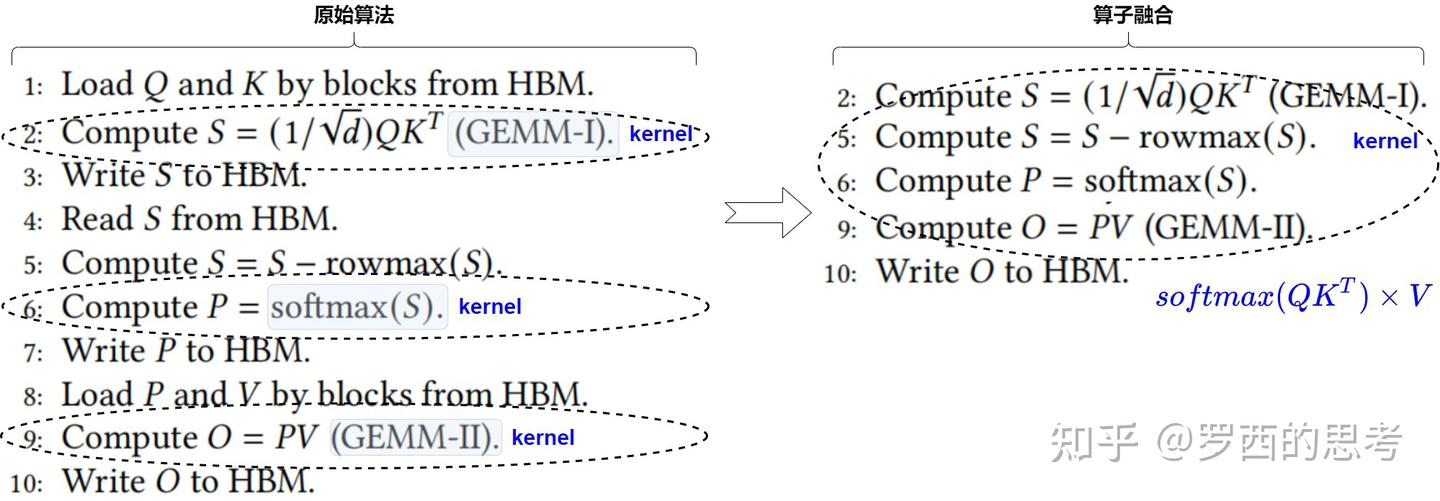
Flash Attention V1
Tiling
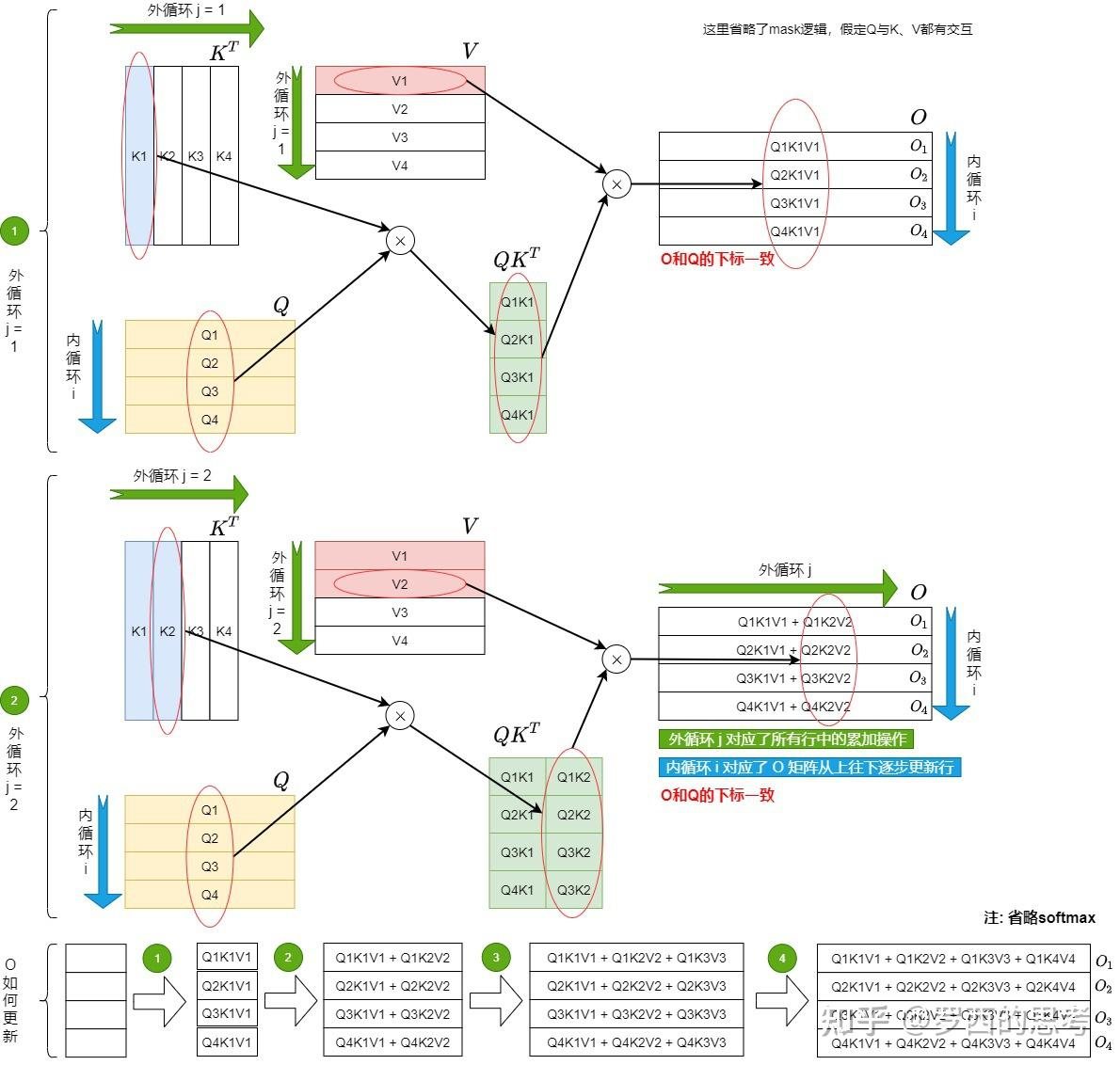
将\(K, V\)切分成\(T_c\)个小块,将\(Q, O\)切分成\(T_r\)个小块,执行双层循环计算:
1 | O_0 = 0 |
HBM 和 SRAM 之间的数据读取/写入操作如下:

Safe Softmax 动态更新
朴素的 softmax 计算:\(softmax(x_i)=\frac{e^{x_i}}{\sum_{j=1}^B e^{x_j}}\) 容易出现上溢和下溢问题。(指数项\(e^{x_i}\)超过浮点数表示范围时发生上溢;\(x_i\)是较大的负值时每个\(e^{x_i}\)下溢导致分母为0)
稳定的 softmax 版本:
\[ \begin{align*} m(x)&=\max([x_1, x_2, ..., x_B]) \\ f(x)&=[e^{x_1-m(x)}, ..., e^{x_B-m(x)}] \\ softmax(x)&=\frac{f(x)}{\sum_i f(x)_i} \end{align*} \]
其中,\(\sum_i f(x)_i\) 是\(f(x)\)的所有元素求和。
softmax 分块计算是一大难点,因为其分母依赖于每一个元素。分块计算的关键在于更新全局最大值\(m(x)\)和分母\(\sum_i f(x)_i\).
考虑向量\(x\in\mathbb{R}^{2B}\),分成两块:\(x=[x^{(1)}, x^{(2)}]\)。在分块计算中先处理\(x^{(1)}\),再处理\(x^{(2)}\).有:
\[ \begin{align*} m(x^{(1)})&=\max([x_1^{(1)}, x_2^{(1)}, ..., x_B^{(1)}]) \\ f(x^{(1)})&=[e^{x_1^{(1)}-m(x^{(1)})}, ..., e^{x_B^{(1)}-m(x^{(1)})}] \\ softmax(x^{(1)})&=\frac{f(x^{(1)})}{\sum_i f(x^{(1)})_i} \end{align*} \]
以上是\(x^{(1)}\)对应的局部计算结果,不保存 \(x^{(1)}\),选择保存 \(m(x^{(1)})\) 和 \(l(x^{(1)})\),用于在处理完 \(x^{(2)}\) 后更新 \(x^{(1)}\).
保存两个全局标量:当前最大值 \(m_{max}\) 和全局 exp 求和项 \(l_{all}\). 当前:\(m_{max}=m(x^{(1)}), l_{all}=l(x^{(1)})\).
采取同样的流程处理\(x^{(2)}\).全局标量更新方法如下:
\[ \begin{align*} m_{max}^{new}&=\max([m_{max}, m(x^{(2)})]) \\ l_{all}^{new}&=e^{m_{max}-m_{max}^{new}}l_{all}+e^{m(x^{(2)})-m_{max}^{new}}l(x^{(2)}) \end{align*} \]
分块计算时,局部的\(f(x^{(2)})=[e^{x_1^{(2)}-m(x^{(2)})}, ..., e^{x_B^{(2)}-m(x^{(2)})}]\),则全局的\(f^{new}(x^{(2)})\)更新为:
\[ \begin{align*} f^{new}(x^{(2)})&=f(x^{(2)})·e^{m(x^{(2)})-m_{max}^{new}} \\ &=[e^{x_1^{(2)}-m_{max}^{new}}, ..., e^{x_B^{(2)}-m_{max}^{new}}] \end{align*} \]
更新 \(softmax(x^{(2)})\) 的分子部分:
\[ \begin{align*} softmax^{temp}(x^{(2)})&=softmax(x^{(2)})·e^{m(x^{(2)})-m_{max}^{new}} \\ &=\frac{f(x^{(2)})}{l(x^{(2)})}·e^{m(x^{(2)})-m_{max}^{new}} \\ &=\frac{f^{new}(x^{(2)})}{l(x^{(2)})} \end{align*} \]
将分母 \(l(x^{(2)})\) 替换为全局 exp 求和项 \(l_{all}^{new}\),即:
\[ \begin{align*} softmax^{new}(x^{(2)})&=softmax^{temp}(x^{(2)})·\frac{l(x^{(2)})}{l_{all}^{new}} \\ &=\frac{f^{new}(x^{(2)})}{l_{all}^{new}} \end{align*} \]
整合后观察 \(softmax(x^{(2)})\) 到 \(softmax^{new}(x^{(2)})\) 的更新方式:
\[ softmax^{new}(x^{(2)})=\frac{softmax(x^{(2)})·l(x^{(2)})·e^{m(x^{(2)})-m_{max}^{new}}}{l_{all}^{new}} \]
用到以下额外保存的量:
- \(x^{(2)}\) 的局部 softmax 值 \(softmax(x^{(2)})\);
- \(x^{(2)}\) 的局部 exp 求和项 \(l(x^{(2)})\);
- \(x^{(2)}\) 的局部最大值 \(m(x^{(2)})\);
- 全局最大值 \(m_{max}^{new}\);
- 全局 exp 求和项 \(l_{all}^{new}\).
注意,以上从局部到全局的更新无需 \(x^{(1)}\) 或 \(x^{(2)}\) 的整个向量值。
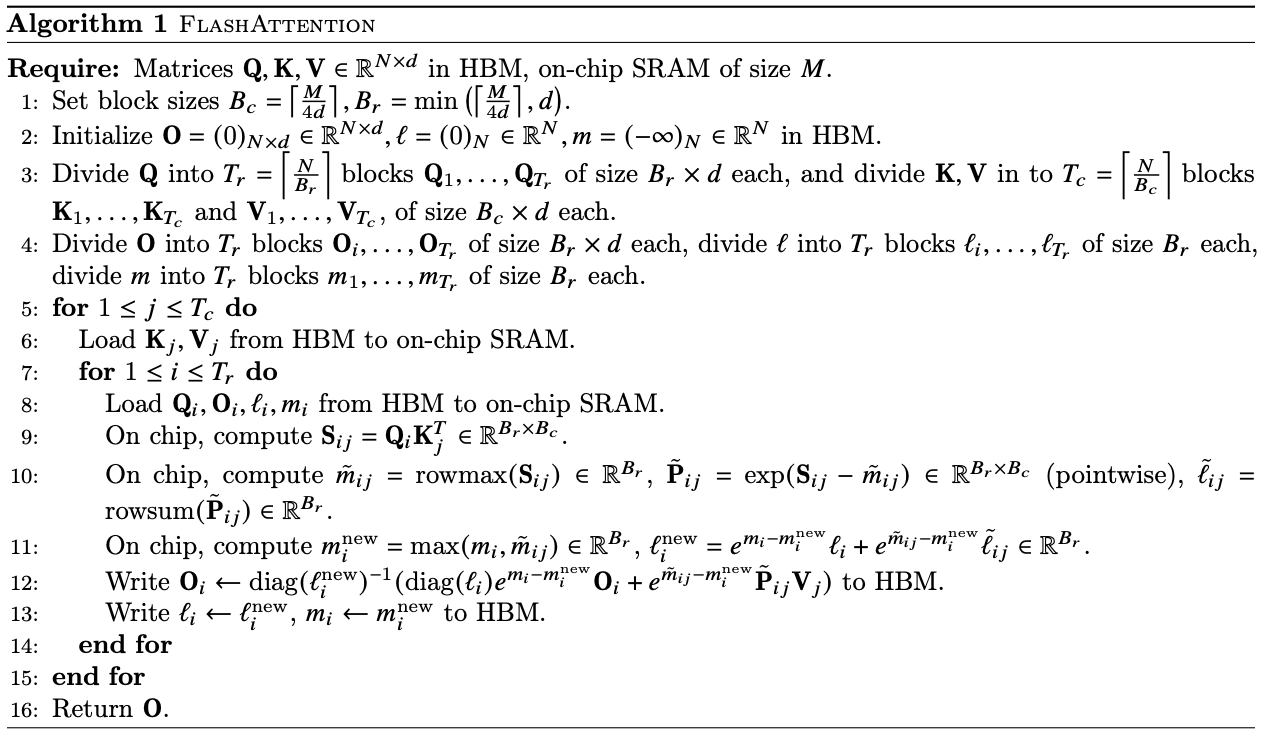
Forward Pass
 如上图所示:
如上图所示:
根据 SRAM 的大小\(M\)选择合适的分块大小\(B_c, B_r\);
在 HBM 中初始化若干变量,包括:最终输出\(O\),指数求和项\(l\),每行 Attention Score 的最大值\(m\);
将 \(Q\in\mathbb{R}^{N\times d}\) 沿着行切分为 \(T_r\) 个大小为 \(B_r\times d\) 的小块;将 \(K, V\in\mathbb{R}^{N\times d}\) 沿着行切分为 \(T_c\) 个大小为 \(B_c\times d\) 的小块。
将 \(O\in\mathbb{R}^{N\times d}, m, l\in\mathbb{R}^{N}\) 沿着行切分为 \(T_r\) 个小块。
外循环:遍历\(K, V\),由 \(T_c\) 控制;
当前外循环遍历到的\(K_j, V_j\)由 HBM 读入 SRAM;
内循环:遍历\(Q, O, l, m\),由 \(T_r\) 控制;
当前内循环遍历到的\(Q_i, O_i, l_i, m_i\)由 HBM 读入 SRAM;
计算当前分块的 Attention Score:\(S_{ij}=Q_iK_j^{T}\in\mathbb{R}^{B_r\times B_c}\);
对于分块的 Attention Score \(S_{ij}\),计算其每一行的最大值 \(\tilde{m_{ij}}\in\mathbb{R^{B_r}}\);
- 基于 \(\tilde{m_{ij}}\),计算指数项 \(\tilde{P_{ij}}=\exp(S_{ij}-\tilde{m_{ij}})\in\mathbb{R}^{B_r\times B_c}\);
- 基于 \(\tilde{P_{ij}}\),计算 exp 求和项 \(rowsum(\tilde{P_{ij}})\in\mathbb{R^{B_r}}\).
计算当前的全局量 \(m_i^{new}\) 和 \(l_i^{new}\)(此时暂且不用于更新旧的 \(m_i\) 和 \(l_i\),因为还需要参与后续计算)
softmax 计算时,行与行之间无交互,分块是列意义上的。因此暂不考虑 batch 计算,每个小块简化为 \(S_{ij}\in\mathbb{R}^{1\times B_c}\). 使用 \(S_i\) 表示每一行的 Attention Score,\(SM_i\) 表示每一行的 softmax.
处理 \(S_{11}\);
处理 \(S_{12}\):计算 \(S_{12}\) 的局部 softmax;\(SM_1\) 更新为 \(SM_1=SM_1^{new}+SM_{12}=\frac{SM_1·l_1·e^{m_1-m_1^{new}}}{l_1^{new}}+\frac{\tilde{P_{12}}·e^{m_{12}-m_1^{new}}}{l_1^{new}}\)
等式右侧第一项是一个\(N\)维向量,前\(B_c\)项有效,其他均为0;第二项中 \(\tilde{P_{12}}\in\mathbb{R}^{1\times B_c}\), 可以重定义为一个\(N\)维向量,其他位置上均为0.
求和效果等价于:更新第\([1, B_c]\)列的值;将新值写入第\([B_c+1, 2B_c]\)列.
更新完 \(SM_1\) 后,输出 \(O_1\) 更新为 \(O_1=O_1^{new}+O_{12}=\frac{O_1·l_1·e^{m_1-m_1^{new}}}{l_1^{new}}+\frac{\tilde{P_{12}}·e^{m_{12}-m_1^{new}}}{l_1^{new}}·V_2\).(\(V_2\) 对应的是 \(S_{12}\) 中的列数)
更新 \(l_i\) 和 \(m_i\).
\(B_r, B_c\) 的设置:\(B_c=\lceil\frac{M}{4d}\rceil\),\(B_r=min(\lceil\frac{M}{4d}\rceil, d)\).
假设 \(B_c=B_r=\frac{M}{4d}\),则从 HBM 加载到 SRAM 的4个矩阵 \(K_j, V_j, O_i, Q_i\) 的尺寸均为 \([\frac{M}{4d}, d]\).因此数据读取的总开销等于 SRAM 的大小 \(M\)(\(l_i, m_i\) 可忽略不计).
Backward Pass
Softmax 求偏导:
softmax 函数表达式为:\(y_i=\frac{e^{z_i}}{\sum_{t=1}^me^{z_t}}\)
求偏导有:\(\frac{\partial y_i}{\partial z_j}=\frac{\partial \frac{e^{z_i}}{\sum_{t=1}^me^{z_t}}}{\partial z_j}\)
- 当 \(i=j\) 时,有 \(\frac{\partial e^{z_i}}{\partial z_j}=e^{z_i}\),则:
\[ \begin{align*} \frac{\partial y_i}{\partial z_j}&=\frac{\partial \frac{e^{z_i}}{\sum_{t=1}^me^{z_t}}}{\partial z_j} \\ &=\frac{e^{z_i}·\sum_{t=1}^me^{z_t}-e^{z_i}·e^{z_j}}{(\sum_{t=1}^me^{z_t})^2} \\ &=\frac{e^{z_i}}{\sum_{t=1}^me^{z_t}}-\frac{e^{z_i}}{\sum_{t=1}^me^{z_t}}·\frac{e^{z_j}}{\sum_{t=1}^me^{z_t}} \\ &=y_i(1-y_j) \end{align*} \]
2. 当 $i\neq j$ 时,有 $\frac{\partial e^{z_i}}{\partial z_j}=0$,则:\[ \begin{align*} \frac{\partial y_i}{\partial z_j}&=\frac{\partial \frac{e^{z_i}}{\sum_{t=1}^me^{z_t}}}{\partial z_j} \\ &=\frac{0·\sum_{t=1}^me^{z_t}-e^{z_i}·e^{z_j}}{(\sum_{t=1}^me^{z_t})^2} \\ &=-\frac{e^{z_i}}{\sum_{t=1}^me^{z_t}}·\frac{e^{z_j}}{\sum_{t=1}^me^{z_t}} \\ &=-y_i y_j \end{align*} \]
\(y=softmax(z)\) 关于 \(z\) 的求导结果是一个 Jacobian 矩阵 \(diag(y)-y^Ty\):
\[ \begin{align*} \frac{\partial\vec{y}}{\partial\vec{z}}&=diag(\vec{y})-\vec{y}^T\vec{y} \\ &=\begin{bmatrix}y_1 & 0 & 0 \\0 & y_2 & 0 \\0 & 0 & y_3\end{bmatrix}-\begin{bmatrix}y_1 \\y_2 \\y_3\end{bmatrix}\begin{bmatrix}y_1 & y_2 & y_3 \end{bmatrix} \\ &=\begin{bmatrix}y_1-y_1^2 & -y_1y_2 & -y_1y_3 \\-y_2y_1 & y_2-y_2^2 & -y_2y_3 \\-y_3y_1 & -y_3y_2 & y_3-y_3^2\end{bmatrix} \end{align*} \]
记 \(\frac{\partial L}{\partial y}=[dy_1, dy_2, dy_3]\),有:
\[ \begin{align*} \frac{\partial L}{\partial\vec{z}}&=\frac{\partial L}{\partial\vec{y}}\frac{\partial\vec{y}}{\partial\vec{z}}=d\vec{y}(diag(\vec{y})-\vec{y}^T\vec{y}) \\ &=[dy_1, dy_2, dy_3]\begin{bmatrix}y_1-y_1^2 & -y_1y_2 & -y_1y_3 \\-y_2y_1 & y_2-y_2^2 & -y_2y_3 \\-y_3y_1 & -y_3y_2 & y_3-y_3^2\end{bmatrix} \end{align*} \]
forward 过程中,没有保存 \(S\) 和 \(P\) 这两个中间结果,而是保存 \(m\) 和 \(l\),用于 backward 阶段中重新计算出 \(S\) 和 \(P\).
流程如下: 
计算量和显存需求
 计算量:主要关注矩阵乘法。
计算量:主要关注矩阵乘法。
- 第9行:\(S_{ij}=Q_iK_j^T\in\mathbb{R}^{B_r\times B_c}\),其中 \(Q_i\in\mathbb{R}^{B_r\times d}, K_j\in\mathbb{R}^{d\times B_c}\),则 \(S_{ij}\) 的计算量为 \(O({B_r B_c d})\);
- 第12行:\(\tilde{P_{ij}}V_j\),其中 \(\tilde{P_{ij}}\in\mathbb{R}^{B_r\times B_c}, V_j\in\mathbb{R}^{B_c\times d}\),计算量为 \(O({B_r B_c d})\).
- 执行的循环次数:\(T_cT_r=\frac{N}{B_c}\frac{N}{B_r}\)
因此,Flash Attention V1 的 forward 总计算量为:\(O(\frac{N^2}{B_cB_r}B_rB_cd)=O(N^2d)\)
标准 Attention 的需要存储 \(S, P\),显存需求为 \(O(N^2)\);Flash Attention 只存储 \(m, l\),\(S, P\) 在 backward 中重计算,显存需求降低至 \(O(N)\).
IO 复杂度
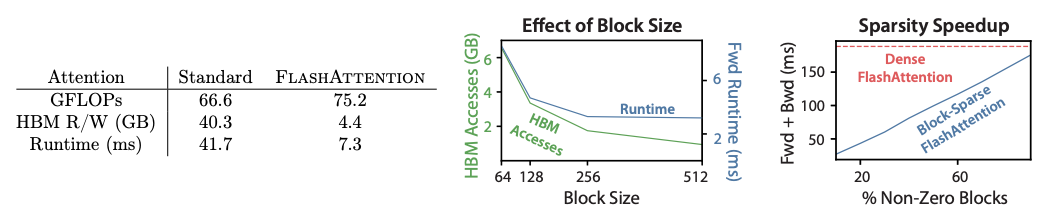
标准 Attention 的 总开销为 \(4Nd+4N^2\),IO 复杂度为 \(O(Nd+N^2)\);
Flash Attention V1:
- 第6行:每个外循环加载 \(K, V\) 的一小块,所有外循环一共加载一次完整的 \(K, V\in\mathbb{R}^{N\times d}\),IO 复杂度为 \(O(Nd)\);
- 第8行:每个内循环加载 \(Q, O, m, l\) 的一小块,一个外循环中的所有内循环共加载一次完整的 \(Q, O\in\mathbb{R}^{N\times d}\)(\(m, l\) IO 复杂度为 \(O(N)\),忽略不计),一共有 \(T_c\) 次外循环。总 IO 复杂度为 \(O(T_cNd)\).
- 第12/13行:将\(O, m, l\) 写回 HBM,IO 复杂度为 \(O(Nd)\).
综上,Flash Attention V1 的 forward 总 IO 时间复杂度为:\(O(T_cNd)=O(\frac{N}{B_c}Nd)=O(\frac{4Nd}{M}Nd)=O(\frac{N^2d^2}{M})\).
论文中有述,一般 \(d\) 的取值为 64~128,\(M\) 的取值为 100KB 左右,因此有 \(\frac{d^2}{M}<<1\)。
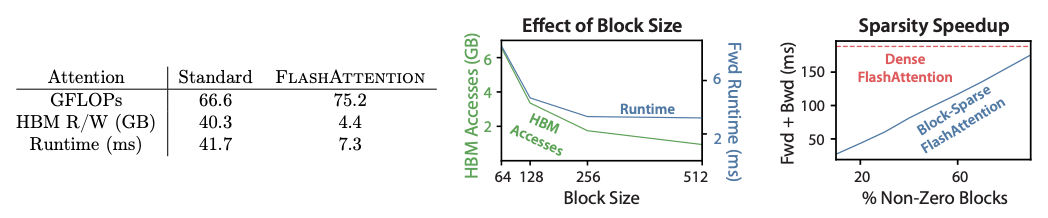
从中间的图可知:数据块越大,读写次数越少,runtime 整体下降(IO 复杂度为 \(O(T_cNd)\),数据块越大,\(O(T_c)\) 越小);数据块大小>256 后,runtime 下降不明显,因为随着矩阵扩大,计算耗时增加,抵消 IO 复杂度降低节省的时间。
Flash Attention V2
FlashAttention V2 相对 V1 主要有3个优化点:Algorithm、Parallelism 和 Work Partitioning。
Algorithm
观察 Flash Attention V1 的 softmax 更新公式:
\[ \begin{align*} softmax^{new}(x^{(2)})&=softmax^{temp}(x^{(2)})·\frac{l(x^{(2)})}{l_{all}^{new}} \\ &=\frac{f^{new}(x^{(2)})}{l(x^{(2)})}·\frac{l(x^{(2)})}{l_{all}^{new}} \\ &=\frac{f^{new}(x^{(2)})}{l_{all}^{new}} \end{align*} \]
以上全局更新的关键点是:将局部的 exp 求和项 \(l(x^{(2)})\) 替换为全局的 exp 求和项 \(l_{all}^{new}\).
计算 \(softmax^{new}(x^{(3)})\) 时,需要乘此时的 \(l(x^{(3)})\)(对应上一轮的 \(l_{all}^{new}\)),再除以新的全局 exp 求和项。
每遍历到一个分块,都会做一次类似的更新操作。实际上等价于:在最后除以最新的 \(l_{all}^{new}\).
举个栗子(今天北京初雪,想吃糖炒板栗):
对于一个等差数列:1, 2, 3, ...;Flash Attention V1 的计算方法为:
\(N=2: f=\frac{1+2}{2}=1.5\)
\(N=3: f=\frac{1.5\times 2+3}{3}=2\)
每一次都算出前 \(N\) 个数的平均值;第 \(N+1\) 步更新平均值。
Flash Attention V2 的做法优化为:
\(N=2: f=1+2=3\)
\(N=3: f=3+3=6\)
最后再除以 \(N\).
从 DataFlow 的维度上看:V1 的方案是外层循环加载 \(K, V\),内层循环加载 \(Q\),那么内层循环每次计算的是 \(O_i\) 的一部分,对于同一个 \(Q_i\),不同的 \(K_j, V_j\) 都需要读写一次 \(O_i\),带来频繁读写 HBM 的问题。
\(O_i\) 的更新与 \(Q_i\) 严格绑定,而不同 \(Q_i\) 的 Attention Score 的计算是完全独立的。所以 V2 的做法是:以 \(Q\) 作为外循环,\(K, V\) 作为内循环。每一个外循环中,完成 \(O_i\) 的计算,即每个 \(O_i\) 只需要读写一次。
计算流程如下: 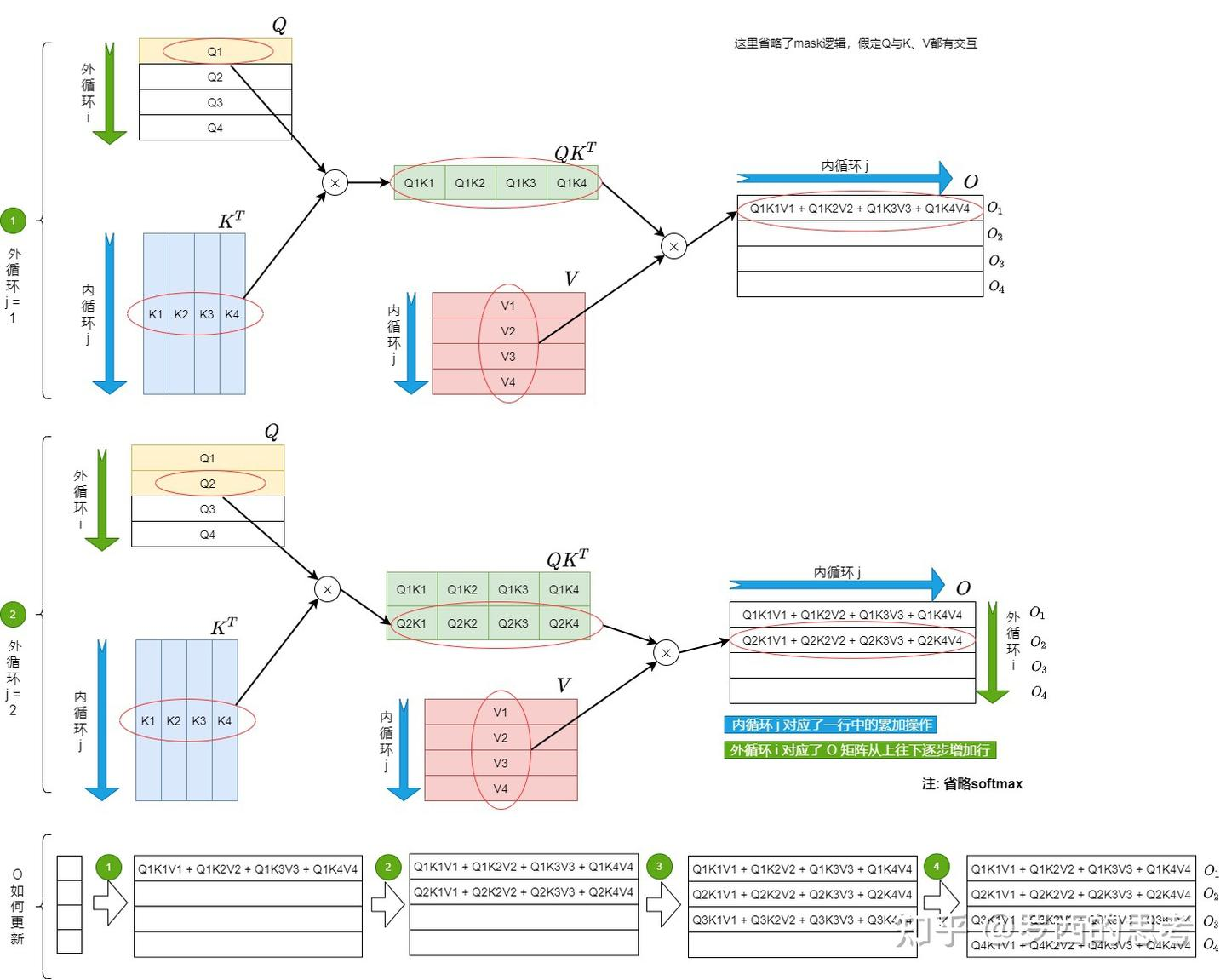
HBM 和 SRAM 之间的 IO 操作如下:
Forward Pass
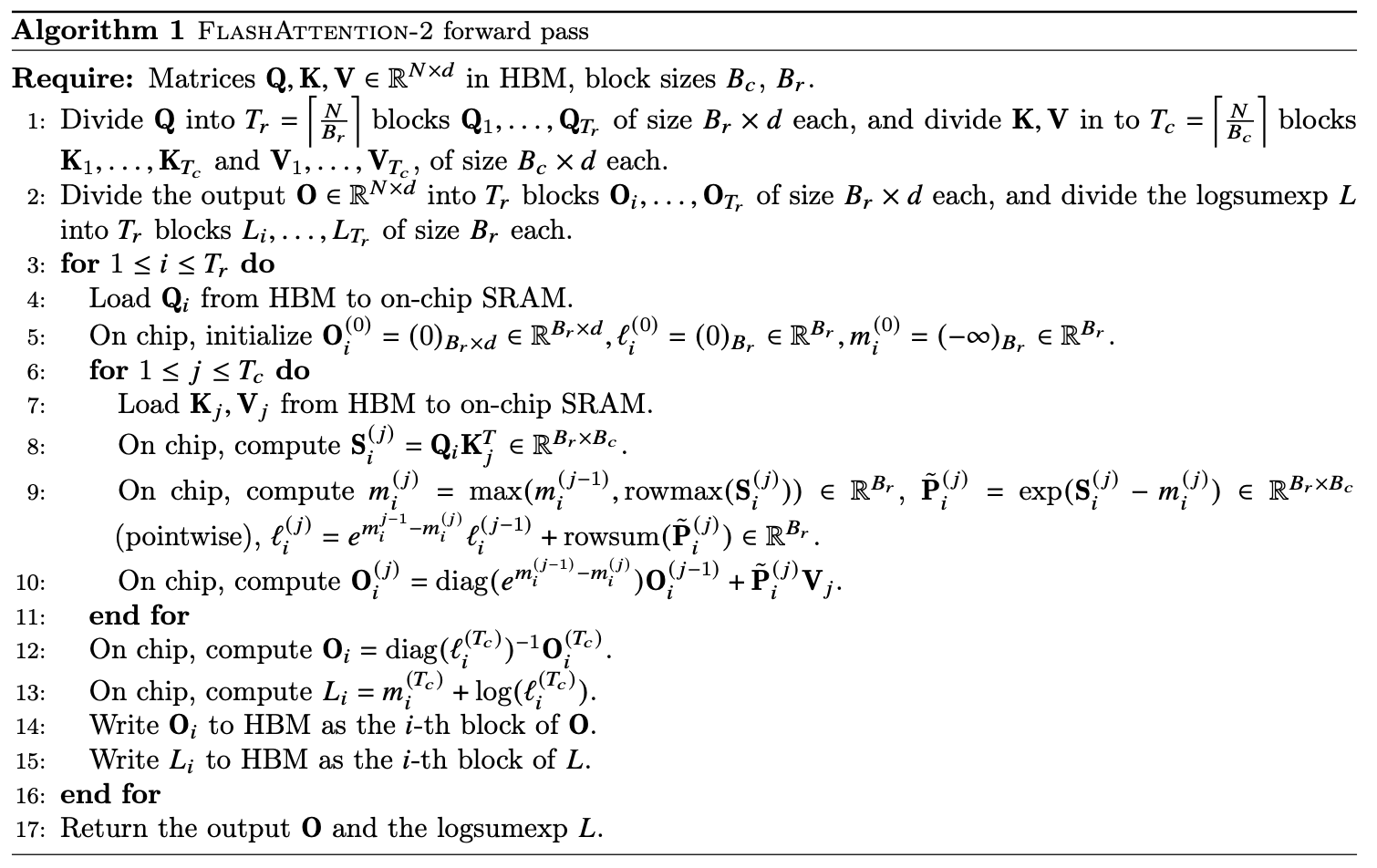 如上图所示:
如上图所示:
将 \(Q\in\mathbb{R}^{N\times d}\) 沿着行切分为 \(T_r\) 个大小为 \(B_r\times d\) 的小块;将 \(K, V\in\mathbb{R}^{N\times d}\) 沿着行切分为 \(T_c\) 个大小为 \(B_c\times d\) 的小块。
将 \(O\in\mathbb{R}^{N\times d}, m, l\in\mathbb{R}^{N}\) 沿着行切分为 \(T_r\) 个小块。
外循环:遍历\(Q, O, l, m\),由 \(T_r\) 控制;
当前外循环遍历到的 \(Q_i\) 由 HBM 读入 SRAM;
初始化 \(O_i\in\mathbb{R}^{B_r\times d}, l_i, m_i\in\mathbb{R}^{B_r}\);
内循环:遍历\(K, V\),由 \(T_c\) 控制;
当前内循环遍历到的 \(K_j, V_j\) 由 HBM 读入 SRAM;
计算当前分块的 Attention Score:\(S_{i}^{(j)}=Q_iK_j^{T}\in\mathbb{R}^{B_r\times B_c}\);
对于分块的 Attention Score \(S_{i}^{(j)}\),计算其截止到当前分块(包含当前分块)的 rowmax \(\in\mathbb{R^{B_r}}\);
- 基于 \(m_{i}^{(j)}\),计算指数项 \(\tilde{P_{i}^{(j)}}=\exp(S_{i}^{(j)}-m_{i}^{(j)})\in\mathbb{R}^{B_r\times B_c}\);
- 基于 \(\tilde{P_{i}^{(j)}}\),计算截止到当前分块(包含当前分块)的 rowsum \(l_{i}^{(j)}\in\mathbb{R^{B_r}}\).
遍历完所有 \(K, V\) 之后,得到的 \(O_i^{(j)}\) 等于最终的全局结果。
与 V1 相比,V2 不用在 FWD 中存储每一个 \(Q_i\) 对应的中间结果 \(m_i, l_i\);然而依然需要在 BWD 中使用 \(m_i, l_i\) 完成 \(S_i^{(j)}, P_i^{(j)}\) 的重计算。V2 采用一个替代方式:存储 \(L_i=m_i^{(T_c)}+\log(l_i^{(T_c)})\)(这里的 \(m_i, l_i\) 分别对应全局的 rowmax 和 rowsum.
\(B_r, B_c\) 的设置:\(B_c=\lceil\frac{M}{4d}\rceil\),\(B_r=min(\lceil\frac{M}{4d}\rceil, d)\).
假设 \(B_c=B_r=\frac{M}{4d}\),则从 HBM 加载到 SRAM 的4个矩阵 \(K_j, V_j, O_i, Q_i\) 的尺寸均为 \([\frac{M}{4d}, d]\).因此数据读取的总开销等于 SRAM 的大小 \(M\)(\(l_i, m_i\) 可忽略不计).
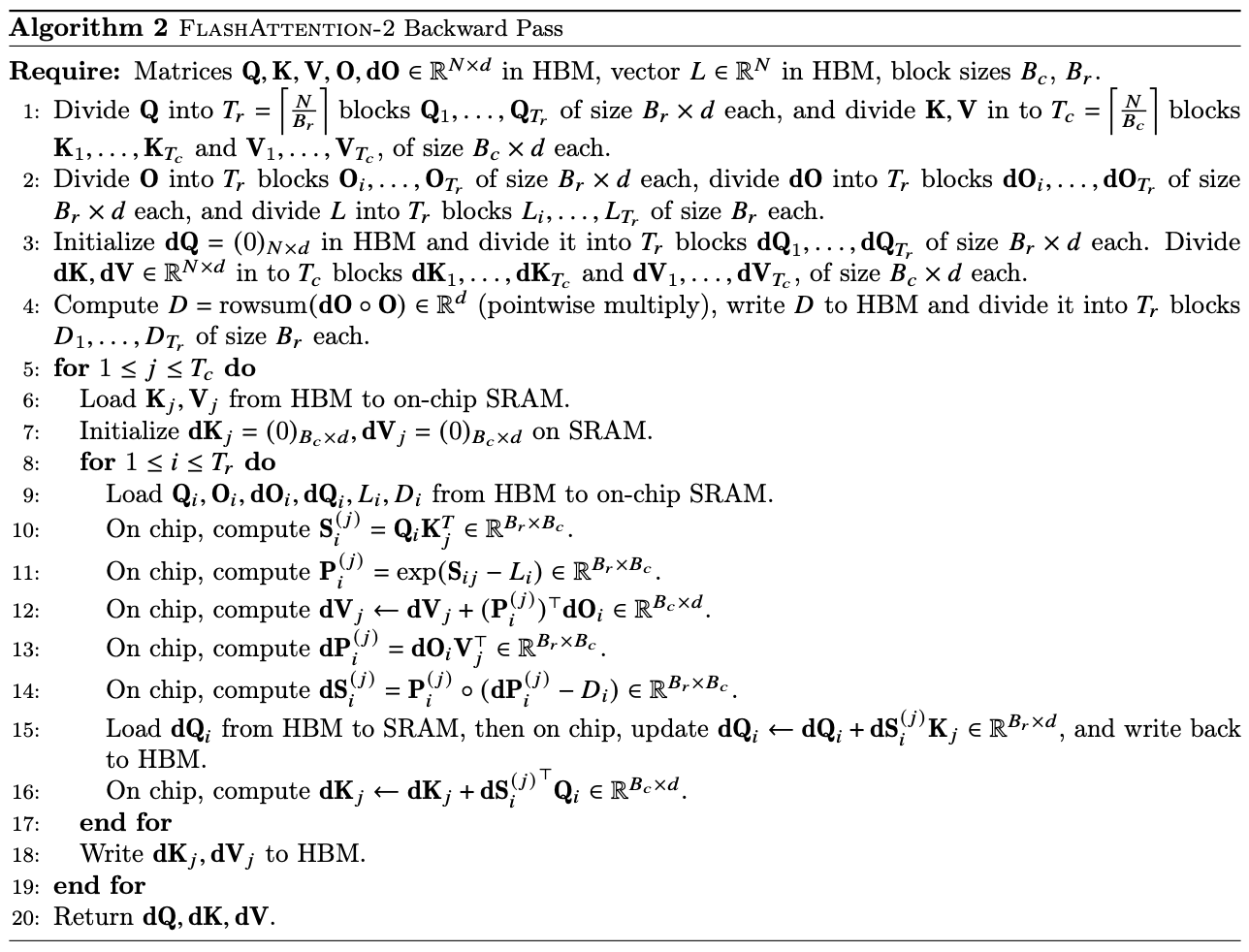
Backward Pass
V2 的 BWD 的内外循环依然采用:\(K, V\) 外循环,\(Q\) 内循环。因为在 BWD 的关键步骤是:\(dK_j, dV_j, dQ_i\)(\(dK_j, dV_j\) 沿着 \(i\) 方向 all-reduce;\(Q_i\) 沿着 \(j\) 方向 all-reduce.);简化的是外循环的计算。因此将 \(K, V\) 放在外循环简化最多。
重计算 \(P_i^{(j)}=diag(l_i^{(j)})^{-1}\exp(S_i^{(j)}-m_i^{(j)})=\exp(S_i^{(j)}-m_i^{(j)}-\log(l_i^{(j)})=\exp(S_i^{(j)}-L_i))\),其中:\(L_i=m_i^{(T_c)}+\log(l_i^{(T_c)})\).
这是在 FWD 中存储 \(L_i\) 的意义。
Parallelism
优化 Attention 部分 thread blocks 的并行化计算,新增 seq_len 维度的并行,使得 SM 的利用率尽量打满。
相较于 CPU,GPU 更适合并行计算。
Thread Block:在每个 thread block 中包含多个 wrap,每个 wrap 包含 32 个 threads;同一个 wrap 中的所有 threads 协作完成矩阵乘法,同一个 thread block 中的所有 wraps 共享存储空间。
Streaming multiprocessors(SM)是 GPU 中真正的物理计算单元,thread blocks 最终被调度至 SM 上计算。因此并行化的最终目标是打满 SM。
1 | // gridDim in V1 |
V1 在 batch 内部、同一个 attention block 的 heads 之间实现并行计算(每个 attention head 对应一个 thread block);block 将被调度至 SM 上执行。以 A100 GPU 为例(一共有 108 个 SM):如果 block 数量较多(比如 80 个以上),说明 SM 利用率较高;然而,随着 LLM 的上下文窗口变长(即 seq_len 变长),单卡上的 batch_size 和 num_heads 将随之变小,导致较多的 SM 空转。
在 V2 的 cutlass 实现中,对 \(Q\) 的 seq_len 进行切分:FWD 中 \(Q\) 为外循环,\(K, V\) 为内循环,不同 \(Q_i\) 之间的计算是独立的,因此可以并行。
V1 后期也引入了基于 \(Q\) 的 sequence parallel,grid 形式为 (batch_size, num_heads, num_m_blocks);V2 中的 grid 形式调整为 (num_m_blocks, batch_size, num_heads).
这一改进的目的为:提升L2 cache hit rate。将 num_m_blocks 放在最外层循环,那么同一列的 block 会相邻;对于同一列的 block,读取的是相同的 \(K_j, V_j\)(可以直接从 Cache 中取)
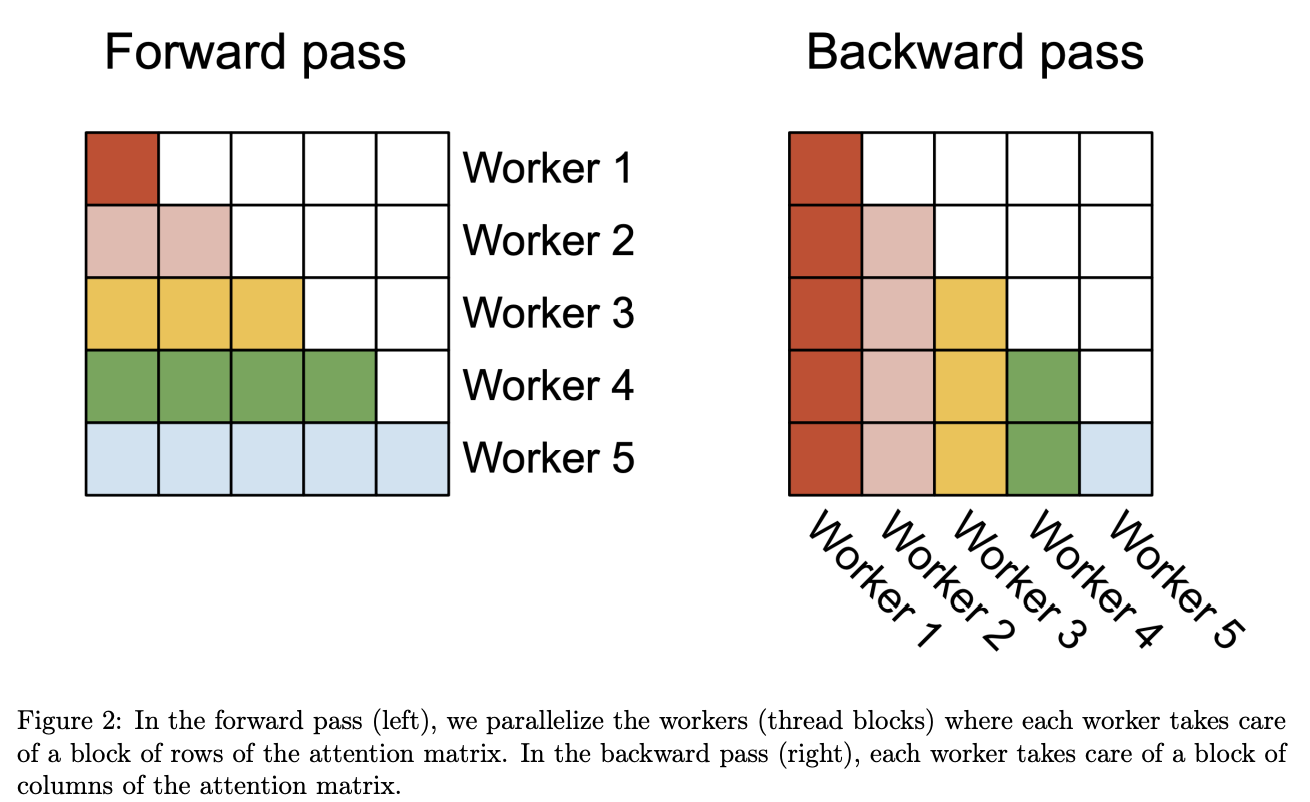 上图为 V2 的 FWD/BWD 过程中的并行。
上图为 V2 的 FWD/BWD 过程中的并行。
- FWD:每一行(一个 \(Q_i\))对应一个 thread block(\(Q\) 为外循环,\(K, V\) 为内循环);
- BWD:每一列(一个 \(K_j, V_j\))对应一个 thread block(\(K, V\) 为外循环,\(Q\) 为内循环)。
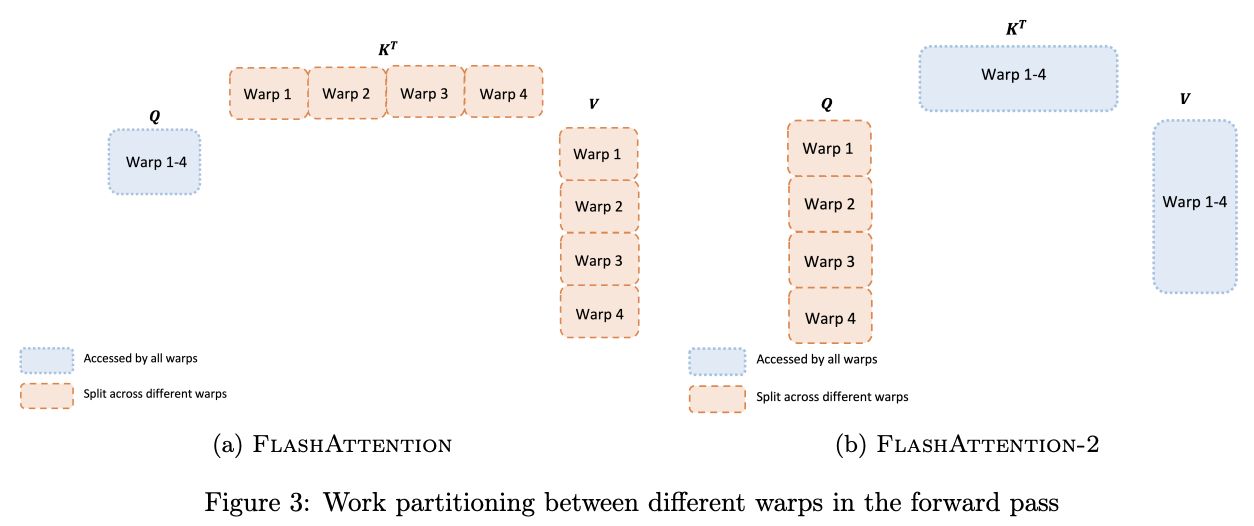
Word Partitioning
针对 thread block 中 wraps 的组织优化。
V1 对 \(K, V\) 按照 seq_len 分成 wrap(对 \(Q\) 不分块):假设将 \(K, V\) 切成4块得到 \(K_1, K_2, K_3, K_4\) 和 \(V_1, V_2, V_3, V_4\),大小均为 \((\frac{N}{4}, d)\). 每个 wrap 的 Self-Attention 计算流程如下:
\[ \begin{align*} S_i=QK_i^T\in\mathbb{R}^{N\times\frac{N}{4}} \\ P_i=softmax(S_i)\in\mathbb{R}^{N\times\frac{N}{4}} \\ O_i=P_iV_i\in\mathbb{R}^{N\times d} \\ \end{align*} \]
每一个 wrap 计算的输出 \(O_i\) 写入共享存储区域;最终将结果叠加得到完整输出 \(O\).
V2 对 \(Q\) 按照 seq_len 分成 wrap(对 \(K, V\) 不分块):假设将 \(Q\) 切成4块得到 \(Q_1, Q_2, Q_3, Q_4\),大小均为 \((\frac{N}{4}, d)\). 每个 wrap 的 Self-Attention 计算流程如下:
\[ \begin{align*} S_i=Q_iK^T\in\mathbb{R}^{\frac{N}{4}\times N} \\ P_i=softmax(S_i)\in\mathbb{R}^{\frac{N}{4}\times N} \\ O_i=P_iV_i\in\mathbb{R}^{\frac{N}{4}\times d} \\ \end{align*} \]
V2 只需将每个 wrap 的结果直接拼接,warps 之间无需通信;另外减少了额外的加法及它对应的读写操作,因此 V2 的 wrap 拆分策略更高效。对比图如下:
参考
FlashAttention: Fast and Memory-Efficient Exact Attention with IO-Awareness
FlashAttention-2:Faster Attention with Better Parallelism and Work Partitioning
图解大模型计算加速系列:FlashAttention V1,从硬件到计算逻辑

{kind=link}